Primer robot en la historia:
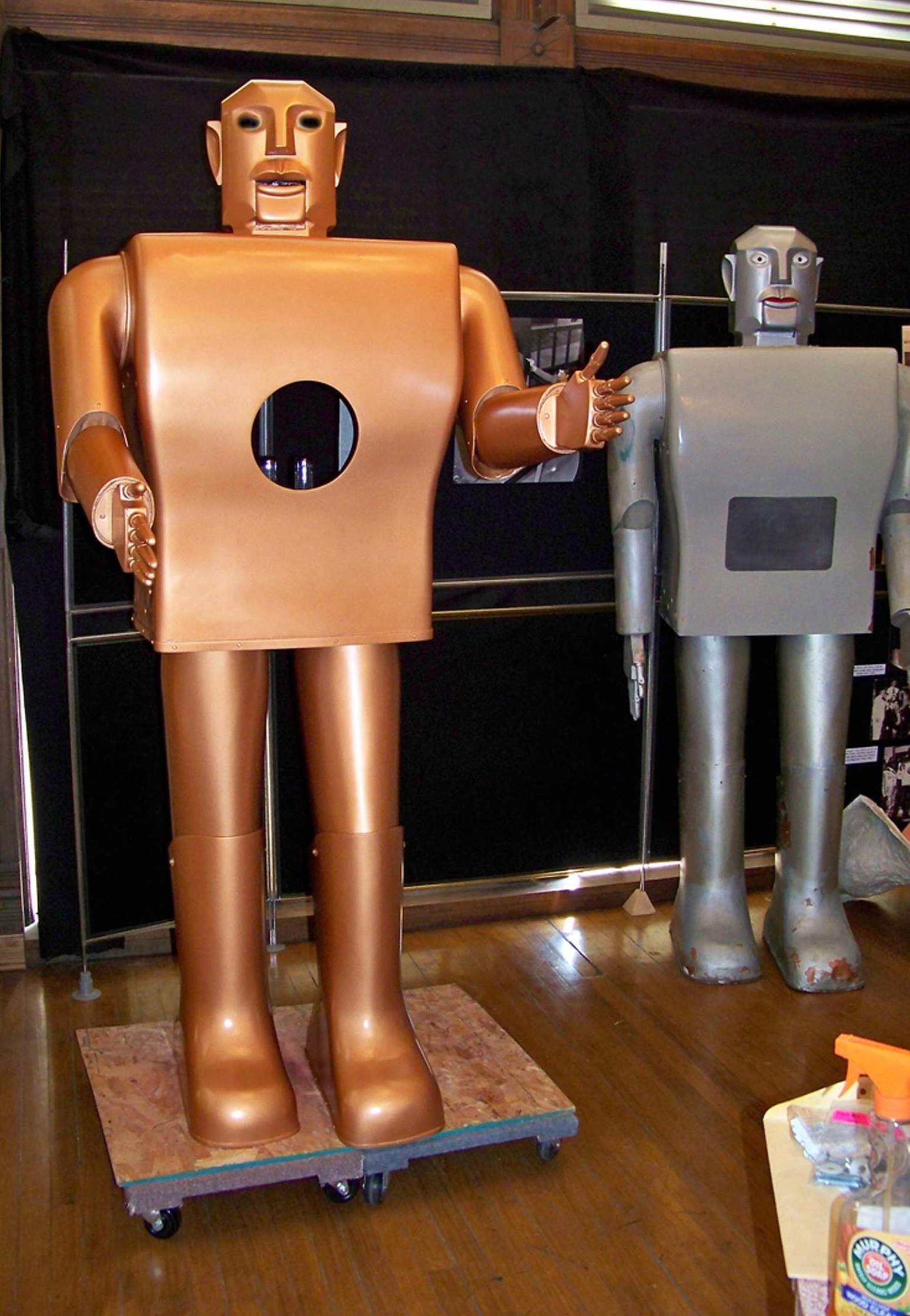
Elektro es su nombre y Joseph Barnett su creador.La feria mundial de Nueva York de 1939 fue su momento de gloria, cuando miles de personas quedaron ojipláticas al ver ese cuerpo de dos metros de altura recubierto de aluminio.
Por aquella época un robot solo era posible en películas y novelas de ciencia ficción, y casi ni eso. Por eso el mundo quedó con la boca abierta cuando vieron aparecer a “Elektro The Motor Man”, un robot de algo más de dos metros de altura, 120 kilos de peso y capaz de realizar 26 movimientos diferentes.
Primer robot humanoide
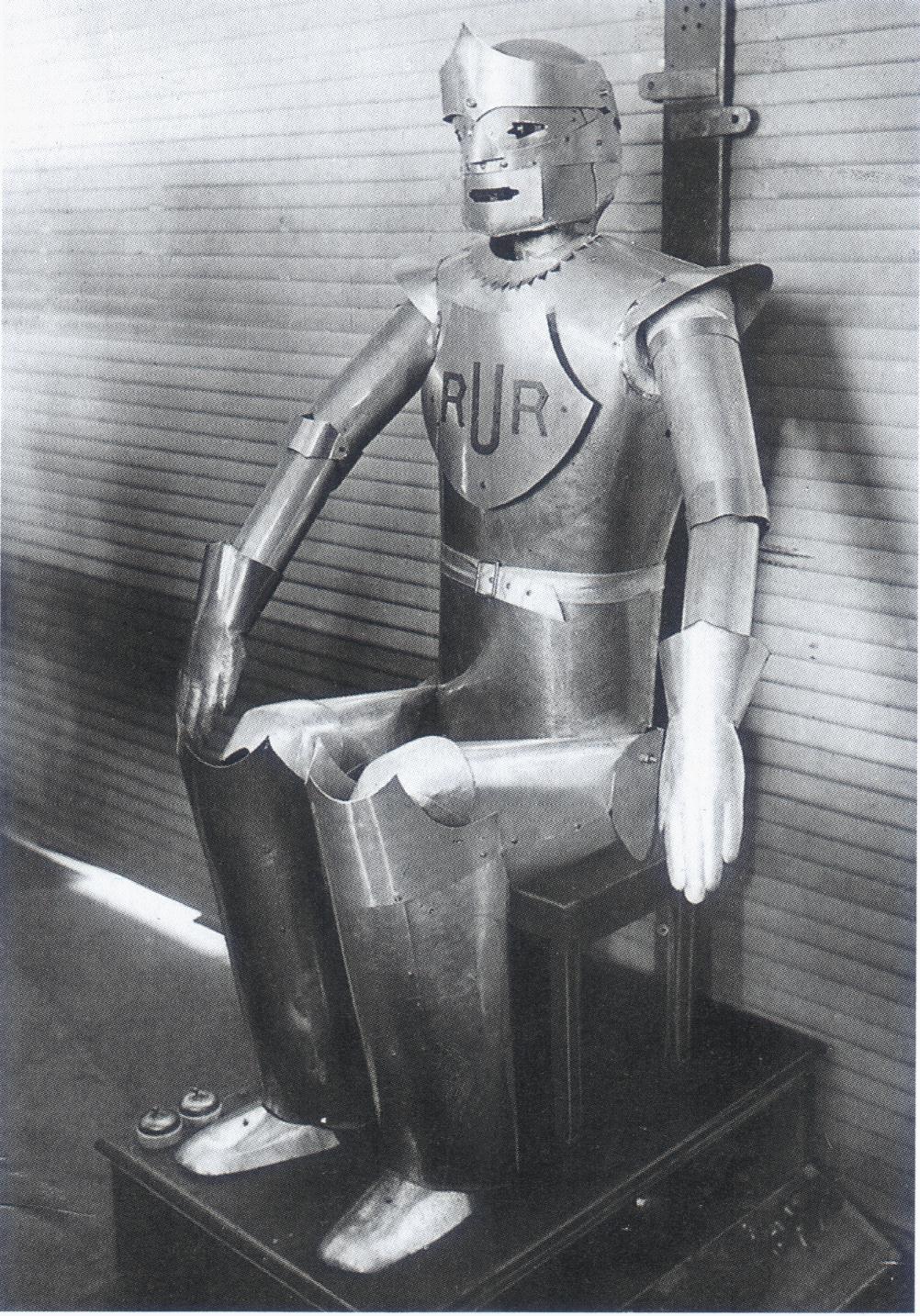
La historia de Eric, el primer robot humanoide y cómo se llegó hasta él. En 1928, un veterano de la Primera Guerra mundial y un ingeniero crearon el que se considera el primer androide de la historia
La historia de Eric, el primer robot humanoide y cómo se llegó hasta él. En 1928, un veterano de la Primera Guerra mundial y un ingeniero crearon el que se considera el primer androide de la historia
Ultimo robot humanoide:
Sophia cuenta con una cara hecha con una silicona especial patentada. Bajo ella, varios motores de muy pequeño tamaño mueven sus facciones para intentar expresar gestos humanos. Sus ojos son capaces de seguir la mirada de una persona gracias a reconocimiento facial, y puede responder a conversaciones más o menos avanzadas con humanos gracias a su Inteligencia Artificial.
Leyes de la robotica:
Características de un robot humanoide:
Un robot humanoide es un robot diseñado para simular la forma y los movimientos de un ser humano. Un diseño humanoide puede tener fines funcionales, tales como la interacción con herramientas y entornos humanos, con fines experimentales, como el estudio de la locomoción bípeda, o para otros fines.

Leyes de la robotica:
- Un robot no puede hacer daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.
- Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la primera Ley.
- Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la primera o la segunda Ley.
- Movimiento. Todos los robots presentan un sistema de coordenadas en las que se va a desplazar. ...
- Energía. Deben de tener una fuente de energía, la cual, convierten en trabajo al efectuar un movimiento.
- Grados de libertad. ...
- Captación de la información. ...
- Autonomía. ...
- Clasificación. ...
- Tipos de movimiento.
Características de un robot humanoide:
Un robot humanoide es un robot diseñado para simular la forma y los movimientos de un ser humano. Un diseño humanoide puede tener fines funcionales, tales como la interacción con herramientas y entornos humanos, con fines experimentales, como el estudio de la locomoción bípeda, o para otros fines.
Muy buen trabajo!!
ResponderEliminargracias!
EliminarGracias por la info
ResponderEliminarAtt: Angel, Kevin y Rene
Buen trabajo.
ResponderEliminarexcelente trabajo muchas gracias
ResponderEliminarBuna info
ResponderEliminar